La technologie permettant de créer des copies numériques de bâtiments, de structures, de complexes entiers et de zones industrielles existe depuis les années 1970, mais ce n’est que récemment qu’elles sont devenues accessibles, pratiques et répandues. Cela s’est produit grâce aux progrès généraux de la technologie informatique, en particulier avec les véhicules aériens sans pilote et les méthodes de traitement des données de photographie aérienne.
Modèle d’Information Sur le Bâtiment (BIM) et Double numérique, qui est un terme connexe est, comme son nom l’indique, un modèle d’information de bâtiment ou de structure qui peut contenir une grande quantité de données et d’informations sur le bâtiment lui-même, ses composants, les réseaux d’ingénierie et les infrastructures environnantes. Double numérique est un concept plus général. Il fournit une connexion entre le monde réel et le virtuel avec un grand nombre de capteurs en ligne qui collectent des données de toute la ville, qui sont unis par le concept d ‘“Internet des objets” (IoT). Bien qu’il soit apparemment impossible, la réalité du contrôle de pratiquement tous les processus de production est déjà là, et la possibilité de contrôler les villes est trop proche pour être ignorée (Deng M., et al., 2021). La première et la plus importante chose nécessaire pour créer des BIM, et plus encore des Doubles numériques, est la collecte de données.

La production est en constante amélioration, chaque jour de plus en plus de maisons apparaissent, le réseau routier change et de nouvelles liaisons de communication se forment. Même le bâtiment simple subit des changements. Collecter des données initiales et les tenir constamment à jour est un véritable défi dans notre monde dynamique. La technologie sans pilote, en particulier les véhicules aériens sans pilote (UAV), s’est facilement intégrée au flux de travail existant de création de copies numériques, réduisant ainsi les coûts et le temps de travail grâce à leur développement vigoureux, à la concurrence croissante du marché et à la disponibilité de la technologie (Barrile, et al., 2019; Hamledari, Hesam, et al, 2017).
Les DRONES sont l’un des outils utilisés par les géomètres, les ingénieurs, les architectes, les constructeurs et les gestionnaires. Il est composé de l’appareil lui-même et de la charge utile qui nous permet de recevoir des données pour construire des modèles. Le type de véhicule aérien, quadricoptère ou avion, et le type de charge utile, caméra photo / vidéo ou LiDAR, sont choisis en fonction de la tâche et de l’ampleur du projet. Considérons les tâches possibles et la technologie qui leur convient.
BIM d’un bâtiment déjà construit ou d’un petit chantier
L’une des solutions technologiques dans ce cas peut être un petit quadrocopter avec un appareil photo. Lorsque vous discutez de la création d’un modèle unique qui n’a pas besoin d’être mis à jour ou lié aux bâtiments environnants, même un récepteur GNSS ne sera pas nécessaire. Si ce travail doit être effectué régulièrement ou si le bâtiment doit être connecté ultérieurement à l’infrastructure environnante, un récepteur GNSS et un support géodésique seront extrêmement importants pour des mesures précises au centimètre près et pour que le résultat puisse être reproduit. Dans un espace urbain ou tout autre espace avec une connexion mobile et une station de base active en permanence, une solution Cinématique en temps réel (RTK) conviendra. Il fournira la précision requise et réduira également le temps consacré à la photographie aérienne, car aucune post-production de données géodésiques ne sera nécessaire.

Contrairement aux bâtiments, les chantiers nécessitent des photographies aériennes plus fréquentes et la manœuvrabilité des drones est primordiale. Les changements se produisent tout le temps, la surveillance doit être effectuée régulièrement pour gérer le processus, de sorte qu’un drone doit avoir plusieurs batteries ou pouvoir être chargé rapidement et avoir un grand nombre de cycles de charge. Une maniabilité peut être nécessaire pour saisir plus en détail les différentes parties du bâtiment, car elles peuvent avoir une géométrie complexe et une précision millimétrique peut être nécessaire. De plus, si la construction a lieu 24 heures sur 24 ou si des mises à jour des données sont nécessaires une fois par jour, elles peuvent être capturées la nuit à l’aide du LiDAR. La technologie est basée sur la prise de vue d’un laser sur un objet qui est ensuite réfléchi vers un récepteur.

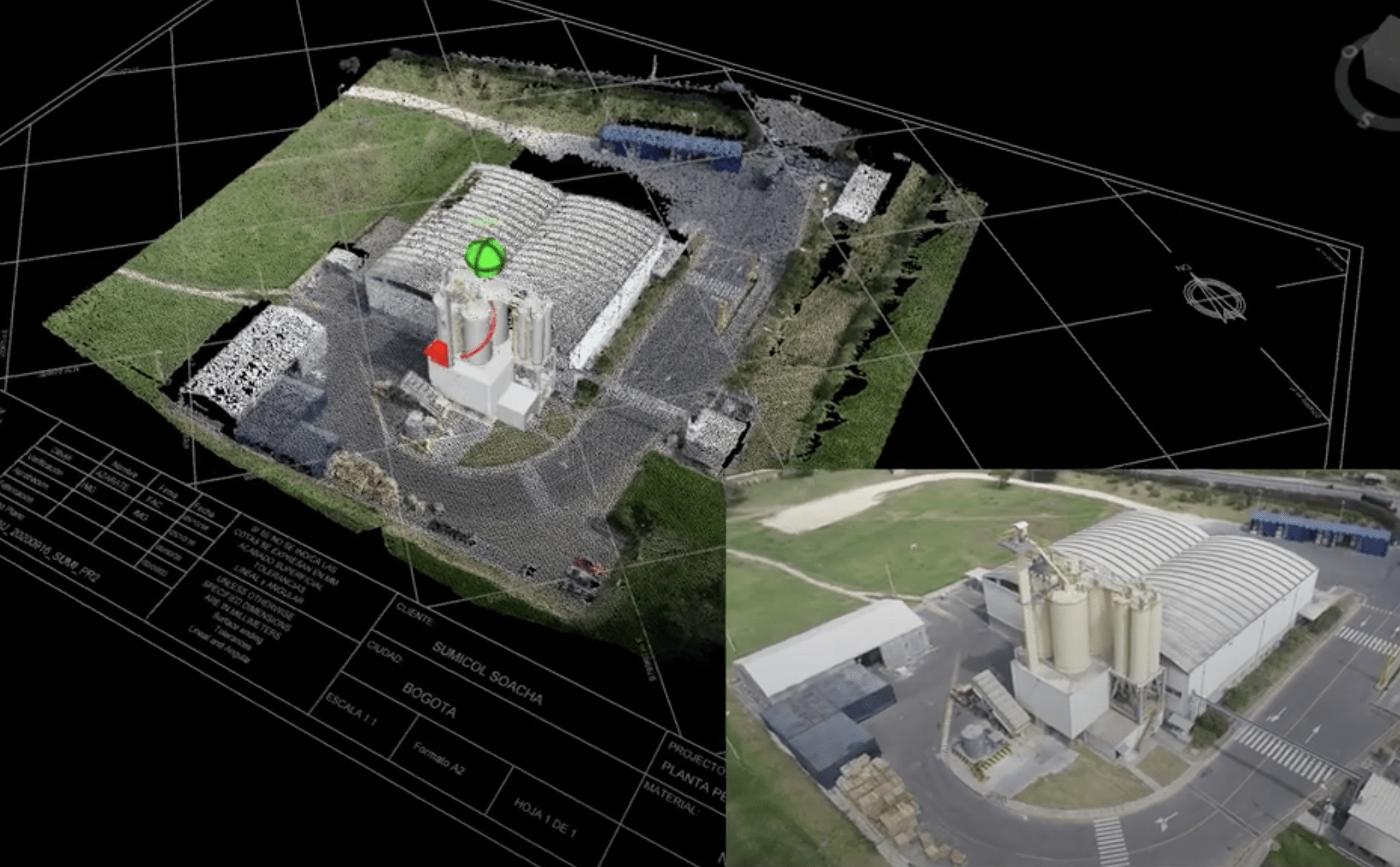
BIM d’un grand chantier ou d’une zone industrielle
Dans ce cas, la zone de capture et de surveillance est nettement plus grande. Cela signifie que le temps de vol de l’UAV est également considérablement augmenté, ou que ses batteries devraient pouvoir être remplacées rapidement et facilement sans perturber la tâche à accomplir. Il peut également être équipé d’un appareil photo avec un meilleur capteur fournissant plus de détails, ce qui est nécessaire lorsque l’UAV vole à une plus grande altitude. Une altitude élevée signifie que le temps de vol peut être réduit car à une plus grande hauteur, plus peut être capturé en un seul coup.
Double Numérique
Le cinquième cas est le plus exigeant sur les spécifications technologiques. Nous avons examiné ci-dessus ce qui dépend de la zone de tir. Cependant, créer une base pour un Double numérique implique également de créer une carte en relief de haute qualité, des contours de bâtiment clairs et un résultat reproductible et très détaillé. Une carte en relief de haute qualité peut être réalisée en LiDAR, même dans les zones boisées. Étant donné que les signaux sont envoyés à la surface très fréquemment, il y a une forte probabilité qu’au moins quelques rayons traversent le feuillage et soient réfléchis par le sol au lieu de la végétation. Des contours de construction clairs et des niveaux de détail élevés permettent à un appareil photo doté d’un grand capteur plein format, d’objectifs de haute qualité et d’un étalonnage fixe. Comme mentionné ci-dessus, la précision et la reproductibilité du résultat peuvent être assurées en disposant d’un récepteur GNSS sur le dispositif avec une approche à la fois Post-Traitement Cinématique (PPK) et RTK.
Traitement des données et résultats
Toutes les données de photographie aérienne passent par des procédures de traitement identiques, quelle que soit la tâche. Les images sont traitées dans un logiciel photogrammétrique spécialisé qui trouve des points apparaissant dans plusieurs images et les relie ensemble dans un espace, en trouvant les coordonnées tridimensionnelles dans chacune d’elles. Cela deviendra ensuite la base de la création de modèles tridimensionnels, de modèles numériques de terrain (MNT) et d’orthophotomapes. Les données LiDAR passent également par certaines étapes de post-production, dont la plus importante est la classification du nuage de points reçu, après quoi il sera possible de séparer les points au sol des points sur la végétation, et les deux des points sur les bâtiments. Un modèle numérique en relief (DRM) peut être construit sur la base de points au sol. Contrairement à un DTM, un DRM ne dispose que de données sur la hauteur du sol, sans végétation ni bâtiments. Les DRM sont une base importante pour la construction, la planification et les travaux géodésiques.
Les modèles tridimensionnels, orthophotmaps et DRMs sont à la base de la création de BIM et de Doubles Numériques réels. Les modèles tridimensionnels donnent la forme des bâtiments et les DRM constituent une base pour le développement ultérieur de la zone. Les infrastructures, la végétation et d’autres détails de la zone peuvent être vectorisés à partir d’orthophotomaps. La rapidité avec laquelle les résultats sont reçus et leur qualité ont porté la planification, le suivi et la construction à un nouveau niveau et ont rapproché l’utilisation quotidienne des doubles numériques, même par les citadins ordinaires.
Application des données reçues
L’inventaire complet des bâtiments et des installations de construction et de production, la surveillance et la sécurité constantes, la planification du développement municipal, les mesures en ligne et en trois dimensions, le calcul des volumes et bien plus encore sont accessibles à l’aide de BIMS et de doubles numériques, mais ils doivent d’abord être créés. Un logiciel moderne fournit des outils pour la reconnaissance automatique des objets. Par exemple, en cliquant sur un nuage de points en forme de tuyau, un objet vectoriel sera créé correspondant aux tailles auxquelles des attributs supplémentaires peuvent être attribués à partir de modèles pré-préparés, tels que l’épaisseur de la paroi, le matériau, le but, etc. Sans parler de la simplicité de création de surfaces, de murs et de toits, vous pouvez également ajouter automatiquement des fenêtres, des conduits d’air et de nombreux autres objets (https://www.autodesk.com/; https://www.geoweeknews.com/ Garagnani et coll., 2012).
Il existe déjà des exemples de projets basés sur des DRONES de petite taille et de grande envergure mis en œuvre dans de nombreux pays. Un géoportail créé pour Tomsk sur la base d’une modélisation tridimensionnelle est un exemple d’un tel projet. La ville entière a été capturée par des drones d’avion équipés d’équipements géodésiques et d’un contrôle de précision avec des marques d’identification au sol. Des données sur des objets individuels ont été ajoutées au-dessus du modèle dans le géoportail lui-même, et des modèles vectoriels d’objets planifiés y sont également placés. Le BIM est plus répandu à l’étranger, des méthodes d’application du BIM et des drones ont déjà été élaborées et se sont généralisées, en particulier dans la construction et l’architecture (Hamledari et al, 2018; Rizo-Maestre et al, 2020).
Recommandation
Chaque technologie a ses particularités et ses restrictions. Les données ne peuvent être reçues que dans des endroits où les drones peuvent être localisés, il est donc recommandé de créer uniquement des objets externes sur la base de données de photographie aérienne. L’intérieur des bâtiments peut être numérisé à l’aide d’autres outils, tels qu’un scanner laser au sol. Le niveau de détail des images reçues dépend de l’appareil photo dont l’appareil est équipé et de la hauteur à laquelle la photographie a eu lieu. Cependant, il est également déconseillé de voler trop près d’eux pour des raisons de sécurité. De plus, bien que la technologie soit facile à apprendre, même les utilisateurs expérimentés d’UAV devraient être formés à chaque nouvelle solution technologique ou modèle d’UAV, y compris dans le traitement des données.
BIM pour les participants au projet
L’application de la technologie BIM en combinaison avec des solutions sans pilote est pertinente pour tous les participants au processus de construction et de production.
Pour les développeurs et les investisseurs
- visualisation des chantiers avant le début des travaux
- gestion efficace des risques pendant la réalisation du projet d’investissement
- suivi des projets de conception et des travaux de construction en temps réel
- évaluer que le projet correspond aux résultats réels de la construction
- création de modèles numériques pour une utilisation ultérieure, la reconstruction ou la démolition de bâtiments et de structures.
Pour les designers
- concevoir avec la possibilité de sélectionner les meilleures options
- minimiser les erreurs lors de la phase de conception grâce à une visualisation de haute précision
- ajustements opérationnels dans la documentation et attirer plusieurs spécialistes à la fois
Pour les constructeurs
- visibilité des solutions techniques et résultat final de la construction
- visualisation du flux de travail de construction et comparaison de ces données avec un calendrier
- lier des tâches de construction spécifiques à des tâches bidimensionnelles ou BIM
- ajustement du projet directement sur le chantier
- la documentation de conception est toujours à jour.
Pour les gestionnaires
- Les modèles BIM correspondent totalement au bâtiment ou à la structure elle-même et contiennent également un ensemble complet de documentation technique
- détection et élimination des défauts en temps opportun
- inventaire complet de toutes les installations de production
- création instantanée de rapports, recevez instantanément des informations sur les modifications.
Il s’agit de l’un des plus grands noms de la littérature française. « Du BIM aux jumeaux numériques: Une revue systématique de l’évolution des représentations du bâtiment intelligent dans l’industrie AEC-FM. »Journal des technologies de l’information dans la construction (ITCON) 26.5 (2021): 58-83.
Barrile, V., et coll. » Intégration d’un modèle 3d issu d’une enquête uav dans un environnement bim. » Archives Internationales de la Photogrammétrie, de la Télédétection et des Sciences de l’Information Spatiale (2019).
Hamledari, Hesam, et al. « Évaluation de la vision par ordinateur et du suivi des progrès de la construction basé sur le BIM 4D sur une plate-forme d’UAV. » Proc., 6E Conférence Internationale sur les Spécialités de la Construction de la CSCE / ASCE / CRC. 2017.
Hamledari, Davari, Sajedi, Zangeneh, McCabe, Fischer (2018), “Planification de Mission d’UAV Utilisant l’Intelligence en essaim et les BIMs 4D à l’appui du Suivi des Progrès de la Construction basé sur la Vision et de la Modélisation telle que construite”, Construction Research Congress 2018, Nouvelle-Orléans, États-Unis.
Rizo-Maestre, C.; González-Avilés, Á.; Galiano-Garrigós, A.; Andújar-Montoya, MD; Puchol-García, J.A. UAV + BIM: Incorporation de Techniques Photogrammétriques dans des Projets Architecturaux avec Modélisation de l’Information du Bâtiment Par Rapport aux Processus de Travail Classiques. Capteur à distance 2020, 12, 2329.
Garagnani, Simone & Mingucci, Roberto & Cinti Luciani, Stefano Conception collaborative pour l’architecture existante: la modélisation de l’information du bâtiment comme frontière pour un processus coordonné. 2012